La forma del movimiento efectuado depende de la forma y orientación del cuerpo con relación a los ejes de los cristales y la posición de los electrodos. Los electrodos metálicos se recubren con otros metales para unirlos al material piezoeléctrico y aplicarles o extraerles la carga eléctrica. Como los materiales piezoeléctricos son aisladores, los electrodos se convierten en placas de un capacitor. Por tanto, un elemento piezoeléctrico que se emplea para convertir movimiento en señales eléctricas, puede considerarse como generador de carga y de forma general modelarse como un capacitor. La deformación mecánica genera una carga, y ésta se convierte en un voltaje definido que aparece entre los electrodos de acuerdo con la ley general de los capacitores.

El efecto piezoeléctrico es sensible a la dirección, porque la tensión produce una polaridad definida en el voltaje, mientras que la compresión produce una opuesta.
Así pues, si al transductor piezoeléctrico de un sensor ultrasónico, con los cortes requeridos, se le aplica en sus extremos (electrodos) un voltaje, el cristal sufre cambios en sus dimensiones, lo que ocasiona un cambio de presión en el medio que lo rodea (en este caso el aire), y viceversa, al ser sometido el cristal a un cambio de presión aparecen cargas eléctricas en sus extremos, donde se crea una diferencia de potencial. Por lo que este tipo de transductor puede funcionar como emisor ó receptor ultrasónico. Ver figura 1.

Figura 1. Generación de una onda ultrasónica debido al efecto piezoeléctrico.
Los ultrasonidos son ondas acústicas cuya frecuencia está por encima del límite perceptible del ser humano, aproximadamente 20 KHz. En el sistema que se presenta en este artículo, se emplean sensores ultrasónicos con una frecuencia de 40 kHz, si bien no hay ningún inconveniente en operar con frecuencias diferentes, si se emplean los transductores apropiados.
Los sensores de ultrasonido son utilizados tanto en aplicaciones industriales como medición de distancias, caracterización interna de materiales, ensayos no destructivos y otros; en medicina, por ejemplo ecografía, fisioterapia, ultrasanoterapia, entre otros.
SENSORES DE ULTRASONIDO PARA MEDICIÓN DE DISTANCIA

Figura 2. Esquema básico de un sensor de ultrasonido para medir distancia.
La mayoría de los sensores de ultrasonido de bajo costo se basan en la emisión de un pulso de ultrasonido cuyo lóbulo, o campo de acción, es de forma cónica, tal como se muestra en la figura 3.
Figura 3. Perspectiva del ángulo de emisión del pulso ultrasónico.
Midiendo el tiempo que transcurre entre la emisión del sonido y la percepción del eco se puede establecer la distancia a la que se encuentra el obstáculo que ha producido la reflexión de la onda sonora, mediante la fórmula:

Donde V es la velocidad del sonido en el aire y t es el tiempo transcurrido entre la emisión y recepción del pulso.
Para este sensor se toma en cuenta que el medio a través del cual viaja el sonido es el aire. Otro material diferente al aire se toma como un objeto, incluyendo sólidos, líquidos y gases. Todos los objetos reflejan y absorben una porción de la onda, una parte de la onda que llega a la superficie del material es reflejada, mientras una parte de la onda penetra el material.
La amplitud de la onda reflejada es directamente proporcional a la superficie del objeto reflejante. El tamaño de la superficie, forma y orientación son también un factor que contribuye a la fuerza de la señal reflejada.
PRINCIPALES PARÁMETROS DE LOS ULTRASONIDOS PARA LA MEDICIÓN DE DISTANCIAS
Modo de operación
En los sistemas de medición de distancia basados en ultrasonidos hay dos modos básicos de operación: modo opuesto y modo difuso (eco). En el modo opuesto, un sensor emite la onda de sonido y otro, montado en posición opuesta al emisor, recibe la onda. Por su parte, en el modo difuso, el mismo sensor emite la onda de sonido y luego escucha el eco que rebota de un objeto.
Margen de detección
Zona ciega

Consideraciones sobre el objeto
Los objetos estándar se usan para establecer los parámetros de rendimiento de los sensores. El usuario debe tener en consideración las diferencias de rendimiento debido a objetos no estándares.
CIRCUITOS PARA TRANSMISIÓN Y RECEPCIÓN DE ULTRASONIDOS PARA LA MEDICIÓN DE DISTANCIA.
En el circuito del transmisor se generan ráfagas de 40 KHz con duración de 5 ms cada 65 ms, al detectar la onda reflejada se genera una interrupción la cual detiene un timer de 16 bits del microcontrolador. En la figura 4 se presenta un diagrama de tiempos del sistema de transmisión y recepción de las ondas de ultrasonido.

Para calcular la distancia se sabe que la velocidad del sonido es de 343m/s =34300cm/s a una temperatura de 20ºC.
Por lo tanto: 1cm= 1seg/34300cm = 29,15us
Para hacer el cálculo de la distancia se divide el tiempo de vuelo entre dos veces el tiempo de un centímetro. Entonces la distancia entre el sensor y el objeto será:

La división entre dos es debido a que se considera que la onda al reflejarse viaja el doble de distancia desde donde se emitió.
4.1 Transmisor de ultrasonido

4.2 Receptor de ultrasonido
En [1] se presentan gráficas donde se puede observar la forma de onda de las señales recibidas por el circuito receptor
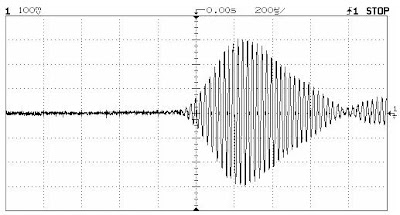
Figura 6. Señal obtenida en el receptor cuando el emisor se localiza a 25 cm de distancia.

Anteriormente se mencionó que los niveles de voltaje de la señal recibida resultan pequeños, alrededor de los 500mV como máximo. Por ello aunado al transductor receptor se agrega una etapa de amplificación conformada por dos amplificadores operacionales tal y como se muestra en la figura 8.

Figura 8. Circuito electrónico de recepción.
En la figura 9, se presenta el esquema completo del diseño realizado.

Figura 9. Esquema completo del diseño realizado.
6. Conclusiones
El sensor de ultrasonido parece tener un funcionamiento muy sencillo, sin embargo existen factores externos de influyen de manera determinante en las medidas realizadas. Por tanto, es necesario un conocimiento de las diversas fuentes de interferencia que afectan a las mediciones para poder tratarlas de forma adecuada, minimizando su efecto. Entre los diversos factores que alteran las lecturas que se realizan con los sensores de ultrasonico cabe destacar:
- El campo de actuación del pulso que se emite desde un transductor de ultrasonido tiene forma cónica. El eco que se recibe como respuesta a la reflexión del sonido indica la presencia del objeto más cercano que se encuentra dentro del cono acústico y no especifica en ningún momento la localización angular del mismo. Aunque la máxima probabilidad es que el objeto detectado esté sobre el eje central del cono acústico, la probabilidad de que el eco se haya producido por un objeto presente en la periferia del eje central no es en absolut despreciable y ha de ser tenida en cuenta y tratada convenientemente.
- La cantidad de energía acústica reflejada por el obstáculo depende en gran medida de la estructura de su superficie. Para obtener una reflexión altamente difusa del obstáculo, el tamaño de las irregularidades sobre la superficie reflectora debe ser comparable a la longitud de onda de la onda de ultrasonido incidente.
- En los sensores de ultrasonido de bajo coste se utiliza el mismo transductor como emisor y receptor. Tras la emisión de ultrasnido se espera un determinado tiempo a que las vibraciones en el sensor desaparezcan y esté preparado para recibir el eco producido por el obstáculo. Esto implica que existe una distancia mínima d (proporcional al tiempo de relajación del transductor) a partir de la cual el sensor mide con precisión. Por lo general, todos los objetos que se encuentren por debajo de esta distancia, d, serán interpretados por el sistema como que están a una distancia igual a la distancia mínima.
- La temperatura afecta la medida, por cuanto la velocidad de propagación de la onda varía dependiendo de la temperatura.
- Un facor de error muy común es el conocido como falsos ecos, estos pueden ocurrir cuando la onda choca con varios objetos antes de llegar al receptor.
- Las ondas de ultrasonido obedecen a las leyes de reflexión de las ondas, por lo que una onda de ultrasonido tiene el mismo angulo de incidencia y reflexión respecto a la normal de la superficie. Esto implica que si la orientación relativa de la superficie reflectora con respecto al eje del sensor de ultrasonido es mayor que un cierto umbral, el sensor nunca reciba el pulso de sonido que emitió.
Para mayor información sobre este trabajo haga click aqui
Para obtener detalles sobre el sensor ultrasónico empleado, haga click aqui